
실제로봇과 가상로봇의 통합 제어시스템
▶ 공고일자 : 2011년 4월 5일
▶ 등록번호 : 1010263690000
▶ 등록일자 : 2011년 3월 25일
▶ 출원번호 : 10-2009-0072012
▶ 출원일자 : 2009년 8월 5일
▶ 심사청구일자 : 2009년 8월 5일
▶ 출원인 : (주)시뮬레이션연구소
▶ 발명자 : 박종훈, 장경석, 이상엽, 최원섭
▶ 대리인 : 박양호, 박기원
▶ 전체 청구항 수 : 총 2항
도면의 주요 부분에 대한 부호의 설명
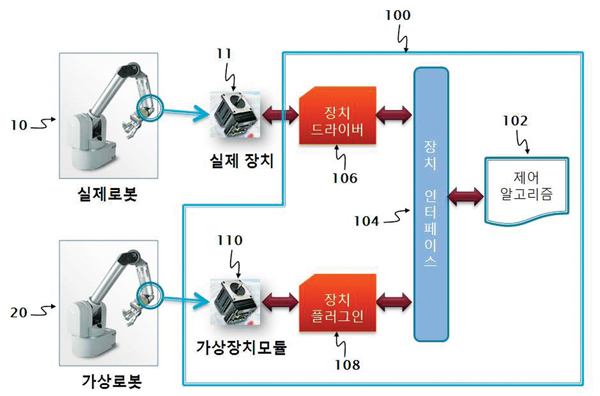
10 실제로봇 11 실제 장치 20 가상로봇 100 제어시스템 102 제어알고리즘 104 장치 인터페이스 106 장치 드라이버 108 장치 플러그인 110 가상장치모듈
■ 기술 분야
본 발명은 실제로봇과 가상로봇의 통합 제어시스템에 관한 것으로, 보다 상세하게는 실제로봇의 장치와 동일하게 가상로봇에도 가상장치를 소프트웨어적으로 구성해 실제로봇의 제어알고리즘을 변경 없이 그대로 가상로봇의 시뮬레이션에 사용할 수 있도록 하는 실제로봇과 가상로봇의 통합 제어시스템에 관한 것이다.
■ 과제 해결수단
본 발명은 로봇의 동작과 이동, 주위 환경에 대한 3차원 동역학 정보를 제공하고, 로봇을 제어하기 위한 제어명령을 생성하는 제어알고리즘과 로봇의 센서나 구동장치, 구성 요소에 대한 모듈화된 데이터를 저장하는 장치 인터페이스와 연결된다. 실제로봇의 상태를 파악하는 센서로부터 실제로봇의 상태정보를 수신하고, 실제로봇의 동작을 실행하는 모터에 동작 제어명령을 전송하는 장치 드라이버와 가상로봇의 상태를 파악한다. 가상로봇의 동작을 실행하는 장치에 대한 정보를 소프트웨어적으로 저장하는 가상장치모듈과 장치 인터페이스와 연결되며 가상로봇의 상태를 파악하는 장치들로부터 가상로봇의 상태정보를 수신, 가상로봇의 동작을 실행하는 장치에 동작 제어명령을 전송하는 장치 플러그인을 포함한다. 제어알고리즘은 가상로봇에 대한 3차원 실시간 물리 시뮬레이션을 위한 기하학 법칙 및 동역학 법칙을 제공하는 물리 시뮬레이션 엔진을 포함하는 것을 특징으로 한다.
■ 효과
가상로봇의 시뮬레이션에 사용되는 제어알고리즘을 변형하지 않고도 실제로봇의 제어에 그대로 사용할 수 있는 효과가 있다.
■ 발명의 실시를 위한 구체적인 내용
도면을 참조하며 본 발명의 실시예에 따른 실제로봇과 가상로봇의 통합 로봇 제어시스템(이하 ‘제어시스템’이라 함)을 설명한다. 가상로봇(20)의 제어에 사용되는 제어시스템(100)을 실제로봇(10)의 제어에도 사용하기 위해서는 실제 하드웨어의 제어에 사용되는 것과 동일한 인터페이스를 가상 시스템에 만들어 줘야 한다. 그러기 위해서는 로봇과 제어알고리즘 사이의 데이터 입출력을 동일하게 맞춰야 하는데, 이를 위해 도면에서와 같이 가상로봇을 구성하는 가상장치모듈(110)을 제어시스템에 구성해야 한다. 가상로봇을 시뮬레이션하기 위해서는 가상장치모듈에 값을 읽거나 쓴다. 즉, 제어알고리즘(102) 입장에서는 제어하고자하는 로봇이 가상로봇이든 실제로봇이든 상관없이 현재 로봇의 상태를 읽기용 장치의 버퍼로부터 얻어오고, 제어값을 계산한 후 계산된 제어값을 쓰기용 장치의 버퍼에 쓰는 동일한 일을 하면 된다. 이를 위해 제어시스템은 실제 장치(11)를 모사하도록 가상장치모듈을 구현하고, 제어알고리즘 입장에서 봤을 때의 이 둘의 공통점, 곧 로봇 장치는 로봇의 상태값을 읽고 제어 입력값을 쓰는 일을 한다는 점을 뽑아내어 이를 추상화한다. 그리고 이들 각각의 세부 실제 구현은 플러그인(Plug-in)의 형태로 이루어지도록 한다. 가상장치모듈은 가상로봇을 구성하는 센서나 모터 등의 구동장치를 표상하는 소프트웨어 모듈로서, 실제로봇의 동작에서와 같이 회전량이나 토크값의 입력에 따라 동작하도록 시뮬레이션 된다. 도면에 도시된 바와 같이 제어알고리즘은 장치를 추상화하는 장치 인터페이스(104)를 통해서 값을 읽어오고 쓴다. 제어시스템에는 실제로봇을 제어하기 위해서 장치 드라이버(106) 등을 구현한 실제 장치를 위한 플러그인이 설치된다. 그리고 가상로봇을 제어하기 위해서는 별도로 제공되는 Device API 등을 이용한 장치 플러그인(108)을 설치하면 된다. 다시 말해서 장치 플러그인을 교체해 주면 동일한 제어알고리즘을 아무런 변경 없이 실제 하드웨어의 제어에 사용할 수도 있고, 시뮬레이션의 가상로봇 제어에도 사용할 수 있다. 가상 장치에 대한 플러그인은 흔히 로봇에 사용되는 엔코더, 타코메터, 모터 등이 포함되며, 이러한 가상 장치에 대한 플러그인이 구현된 상태에서 사용자는 실제 장치에 대한 장치 드라이버만 구현하면 제어시스템을 사용할 수 있게 된다.
그리고 가상장치모듈에 대한 장치 플러그인의 경우, 물리법칙을 적용함으로써 실제 장치와 동일한 동작을 하도록 모사하는 플러그인(물리 플러그인)뿐만 아니라, 이 장치가 시뮬레이션 상에서 시각적으로 어떻게 표현이 되는지를 정의하는 플러그인(그래픽스 플러그인)도 사용될 수 있다. 물리 플러그인은 다물체 시스템의 3차원 실시간 물리 시뮬레이션을 위한 기하학 법칙, 동역학 법칙을 제공한다. 또한 물리 플러그인은 각종 기하체들의 실시간 충돌 검출을 위한 충돌검출엔진, 강체 및 유연체간의 다수 충돌 및 접촉에 의한 동역학 해법엔진, 폐루프 구조를 포함한 일반적인 관절형 다물체 시스템의 시뮬레이션을 위한 동역학 엔진을 포함한다. 그래픽스 플러그인은 로봇의 시뮬레이션 결과를 시각적으로 표시하는 부분으로, 로봇이나 환경에 대하여 모델링된 파일을 받아서 3차원 렌더링(Rendering)된 화면으로 보여주거나, 시뮬레이션 결과들을 받아서 로드(Load)된 로봇 모델의 움직임을 사용자에게 보여준다. 이와 같이 사용자는 장치 플러그인을 어떻게 구성하느냐에 따라 실제와 동일한 로봇의 행동을 구현하면서 실제 관찰자와 동일하게 로봇의 동작을 관찰할 수 있다. 또한 실제 장치를 제어하는 드라이버와 가상장치모듈을 제어하기 위한 플러그인을 동시에 설치하고, 상황에 맞는 제어방법을 선택함으로써 이미 개발한 로봇 제어 알고리즘을 별도의 변경 없이 다양한 형태의 로봇 하드웨어에 그대로 적용할 수 있도록 하는 환경을 제공할 수 있게 된다. 도면을 참조해 본 발명의 바람직한 실시예를 설명했지만, 상술한 본 발명의 기술적 구성은 본 발명이 속하는 기술 분야의 당업자가 그 기술적 사상이나 필수적 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적인 것이 아닌 것으로서 이해되어야 하고, 본 발명의 범위는 상세한 설명보다는 후술하는 특허청구범위에 의하여 나타내어지며, 특허청구범위의 의미 및 범위 그리고 그 등가 개념으로부터 도출되는 모든 변경 또는 변형된 형태가 본 발명의 범위에 포함되는 것으로 해석돼야 한다. 특허정보검색서비스 www.kipris.or.kr







