
뱀모양 로봇의 이동 기구
뱀 모양 로봇의 최대 특징은 가늘고도 긴 동체에 있다. 이러한 동체를 이용하여 좁은 공간에 들어가거나 몸을 다리모양으로 만들어 도랑을 건널 수도 있기 때문에, 비좁고 요철(凹凸)이 심하며 정지되지 않는 곳을 이동하는 데 적합하다. Hirose는 1972년 말에 최초의 뱀 모양 로봇을 개발한 후 현재에 이르기까지 많은 모델을 시험적으로 제작해 왔다.
1. 뱀 모양 이동 로봇의 기본 형태
Hirose가 제작한 뱀 모양의 이동 로봇은 모두 복수의 관절을 직렬로 연결시켜 구성되고 있는데, 그 기구를 정리해 보면 관절 기구와 추진기구의 구성법에 의해 대별할 수 있다. 뱀 모양 이동 로봇의 관절 기구는 액추에이터(Actuator)로 구동되는 능동 관절을 가지고 있느냐의 여부로 나누어지며, 능동 관절은 다시 일반적인 뱀과 같이 굴곡운동을 하는 형태와 굴곡운동과 함께 지렁이처럼 신축운동을 하는 형태로 나눌 수 있다.
뱀 모양 이동 로봇의 추진 기구는 능동 추진 기구를 가지고 있느냐의 여부로 나누어진다. 이 중에서 능동 추진 기구가 없는 형태는 캐스터(Caster)를 가지고 있는지, 아니면 그것도 없이 동체 접지를 하느냐에 따라 나누어진다. 능동 추진 기구를 가진 형태는 차륜, 크롤러(Crawler), 나선형 구동의 어느 것인가에 따라 나누어진다. Hirose가 지금까지 개발한 뱀 모양 이동 로봇은 19가지이며, 형태로는 A 형태에서 I 형태까지 9가지가 있다.
|
|
|
|
|
|
|
|
|
|


2. 각 형태의 특징
가. A 형태
A 형태는 뱀의 ‘포복 추진’을 충실히 재현하는데 적합하다. 뱀의 포복 추진에서는 체간과 지면과의 마찰 중에 신체에 따른 방향의 마찰계수 μt가 작고 이와 직교하는 방향의 마찰계수 μn이 크며, 마찰계수 비(μt/μn)가 작은 것이 바람직하다. A 형태에서 이용되는 캐스터는 진행방향이 차륜의 회전 저항 등으로 매우 작고 μt/μn이 작아서 실제의 뱀보다 효율적인 포복 추진을 실현할 수 있다. 이 원리를 이용한 추진을 Hirose 등은 ‘활공 추진’이라고 부르며, 롤러스케이트를 타는 보행 로봇에도 사용되고 있다.
나. B 형태
실제의 뱀은 캐스터를 가지고 있지 않기 때문에 실제의 뱀과 같은 운동은 이 B 형태로 분류되는 로봇에서 실현된
다. B 형태의 동체 접지에서는 마찰계수 비 μt/μn이 작아지지 않으므로 이 결점은 뱀 모양 자세로 어느 정도 해소할 수 있다. 앞으로는 접촉면의 마찰계수 비
μt/μn이 작아지면 B의 구성은 매우 실용적인 것이 되므로 이러한 특성의 외피재개발을 하는 것은 대단히 흥미로울 것으로 생각된다.
다. C, D 형태
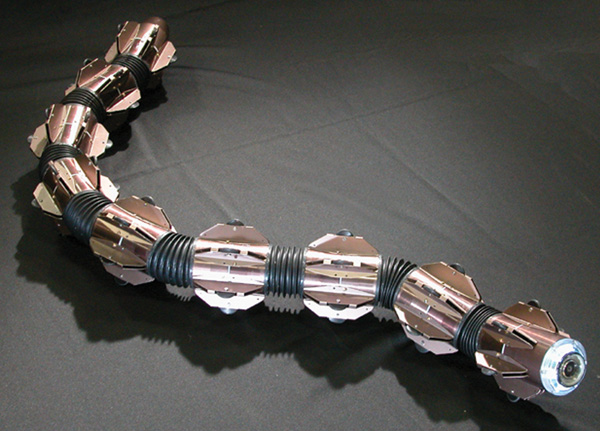
보아(boa)와 같은 대형 뱀이나 지렁이는 체간을 신축시켜 추진하는데, 이에 대응하는 이동법이다. 뱀 모양 이동 로봇의 형태 중에서 Slim Slime-1은 체간 내에 방사상으로 나열한 3가지의 공압 구동 벨로즈(Bellows)를 배치하고 이들의 신축운동으로 체간의 굴곡과 신축운동을 실현한 것으로서 이 계열의 초기 모델이다. Slim Slime-3은 제어성을 다소 희생시켜서라도 공압 벨로즈의 유효 단면적을 될 수 있는 대로 올려서 추력을 향상시키는 것을 목적으로 한다.
뱀 모양 이동 로봇의 형태 중에서 ACM-S1은 공압이 아니라 작동하는 진동 모터로서 같은 운동을 생성하기 위해 전동 모터로 인접 마디에 결합된 3개의 탄성 로드(Rod)의 다른 끝단을 개별적으로 직진시키는 구동 기구를 도입하고 있다. 탄성 로드 3개를 동시에 구동하면 신축하고, 다른 길이가 되도록 구동하면 굴곡이 생성된다. Slim Slime-3과 ACM-S1 모델은 전진하기 쉽도록 접지하는 외피부에는 One Way Clutch가 부착된 차륜을 설치하고 있다.
라. F 형태
이 구성은 凹凸이 있는 건조한 환경 이동을 상정하는 경우에 특히 유효하다. 뱀 모양 이동 로봇의 형태 중에서 OBLIX는 경사진 축의 회전과 동축의 회전을 조합하여 굴곡운동을 생성하고, 이에 동륜을 부착한 것이다.
각 관절의 가동범위는 좁으나 거의 원통형의 매끄러운 체형을 구성할 수 있는 것이 특징이다. 뱀 모양 이동 로봇의 형태 중에서 교룡-1과 교룡-2는 원자로 내의 좁은 계단 등이 있는 환경을 이동하여 점검 작업을 수행할 목적으로 20년 전에 Hirose 등에 의해 시험적으로 제작한 것이다.
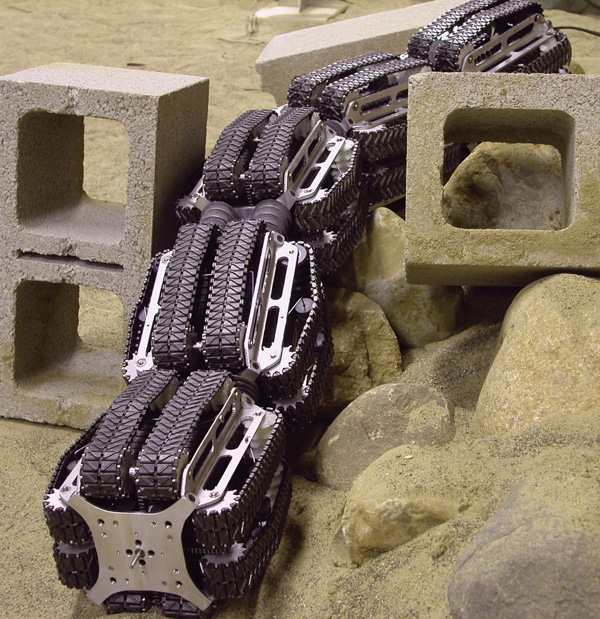
뱀 모양 이동 로봇의 형태 중에서 ACM-R4는 굴곡 관절의 축에 동륜을 부착하여 방진?방수성을 갖춘 관절을 90도로 서로 연결하고 구동하는 것이다. 뱀 모양 이동 로봇의 형태 중에서 창룡 시리즈는 재해 구조용으로 개량된 것으로서 이들은 가늘고도 긴 체간이라는 뱀 모양의 특성을 살리면서 관절수를 줄이기 위해 3개의 동체 각각을 크롤러로 덮어 추진력을 생성한다.
뱀 모양 이동 로봇의 형태 중에서 창룡-5는 그 크롤러 벨트로 체간 전체를 덮는다. 이러한 구성이면 관절을 굽히는 기구의 편입이 곤란하나 이 모델로 크롤러를 4개의 탄성봉으로 연결하고 이들의 개별신축으로 원활한 곡선 모양의 굴곡을 생성하는 기구를 도입하여 이 문제를 해결하였다.
뱀 모양 이동 로봇의 형태 중에서 창룡-6은 될 수 있는 대로 소형화를 시도하였으며, 관절부에 설치한 한 쌍의 좌우 회전 암(Arm)으로 이어지는 탄성판을 이용한 특수한 관절 기구로 2자유도 운동을 생성하고 있다.
마. G, I 형태
이들은 나선상에 배치한 차륜을 체간 주위에 회전시킴으로써 추진력을 생성하는 형태이다.
뱀 모양 이동 로봇의 형태 중에서 ACM-R6은 체간에 수납된 모터의 회전을 자기 커플링(Coupling)으로 외부에 전달하는 구조를 통해 수밀성을 생성한다.
그리고 차륜뿐만 아니라 핀(Fin)도 나선상으로 배치하고 지상에서나 수중에서도 이동을 가능하게 하였다.
바. H 형태
뱀 모양 이동 로봇의 형태 중에서 Thes-2는 25[㎜] 배관을 점검하는 로봇으로서 개발하였다. 스프링에 의해 작은 기어 모터를 관벽 내부에 압착시켜 추력을 생성하고 있다. 이러한 배관 로봇의 경우는 정보나 에너지를 전달하도록 외부와 와이어로 연결시켜야 하며, 그 견인이 큰 문제가 되고 있다. 끝으로 현무라고 불리는 시리즈는 스프링 성을 가지는 체간에 복수의 능동 차륜을 부착한 뱀 모양 이동 로봇이다.
3. 맺음말
만능적인 뱀 모양 이동 로봇은 아직 존재하지 않으며, 휴머노이드 로봇(Humanoid Robot)을 만들면 사람이 하는 작업은 범용적으로 할 수 있게 될 것이라는 논의가 분분한 것과 같이 뱀 모양 이동 로봇이라고 하는 단순 형태의 로봇이라면 몰라도 만능적인 머신은 아직 만들 수 없다.
뱀 모양 이동 로봇의 흥미로움을 선전해 온 장본인으로서 매우 송구하게 생각하며, 이러한 로봇의 규격이나 적용해야 할 환경의 凹凸 크기에 따라 그 설계는 신중히 바꾸어 나가지 않으면 안 된다.
한국과학기술정보연구원 전문연구위원 이순요(9826@reseat.re.kr)
출처 : 茂男, “ヘビ型ロボットの移動機構”, 「日本ロボット學會誌(日本)」, 28(2), 2010, pp.151~155
사진 : www-robot.mes.titech.ac.jp







