
숭실대학교 지능형로봇연구소(I³RC)
2010년 연구실적 및 이전가능 기술 소개②
「I³RC 2010년도 기술이전 Workshop」에서 2010년 연구실적 및 이전가능 기술이 발표됐다. 이번 워크샵에서 소개된 참여교수들의 보유기술을 △HRI 기술 △로봇제어기술 △응용기술 △소프트웨어 연동기술로 나누어 일부분만 본지에서 소개한다.
로봇제어기술
|
텍스처와 에지 모델링 정보를 이용한 복잡한 환경에서의 전경추출 방법 |
[기술내용]
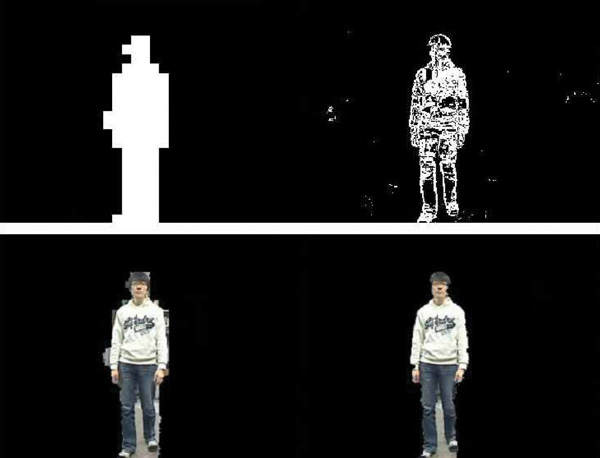
본 시스템은 고정되어 있는 웹 카메라를 이용하여 복잡한 환경에서의 전경 추출을 수행한다. 먼저 제안된 시스템은 LBP(Local Binary Patterns)를 이용하여 텍스처 정보를 추출하고 추출된 텍스처 정보를 기반으로 배경에 대한 모델링을 수행한다. 이때 사용된 LBP 방법은 최근에 제안된 원형 이웃을 기반으로 한 LBP 방법을 사용했고 생성된 배경 모델을 기반으로 간단한 교차(Intersection)방법을 통해 전경에 대한 영역을 검출하며 검출된 영역은 블록 기반의 영역으로 픽셀 단위의 결과를 얻기 위해 MRF(Markov Random Fields)를 이용하여 블록 단위의 결과 영역을 픽셀 단위의 결과로 나타냈다.
하지만 픽셀 단위의 결과 역시 외곽선에서 좋지 못한 결과를 보여주었으며 이 문제점을 해결하기 위해, 배경 에지에 대한 정보를 기반으로 다시 한번 모델링을 수행한다. 제안된 방법은 에지 모델링을 수행함으로써 전경에 대한 에지추출이 가능하게 되어 결국 두 번의 모델링 정보를 동시에 이용하여 MRF에 적용했고, 정교한 외곽선과 함께 실시간에 가까운 수행 시간을 보여줬다.
국내외에서도 학계와 연구소를 중심으로 연구가 진행 중이며, 개선된 컴퓨터 비전 알고리즘을 위한 전처리 과정으로 그 요구가 점차 증대되고 있다.
전경추출의 산업체 응용분야로는 유비쿼터스 환경에서의 포즈인식을 통한 기기제어, 로봇 제어, 비디오 감시 시스템, 손동작 인식, 교육용 엔터테인먼트 산업 등으로 전체 혹은 부분적인 기술이전도 가능하다고 보인다.
|
iGS(Indoor Global Localization System) |

[기술내용]
로봇 자신의 위치 추정과 더불어, 초음파 센서를 이용하여 주변의 물체나 주변의 기준점을 이용하여 주변 물체와의 거리 추정이 가능하다.
초음파 센서는 시각 센서를 이용하기에 제약이 많은 환경이나, 주변 물체와의 거리를 알기 위한 환경에서 주로 사용되고, 초음파 시스템은 로봇에서 초음파를 내보내고, 대상 물체에서 반사되어 되돌아오는 시간을 계산하여 대상 물체와의 거리를 계산한다.
초음파 센서는 측정 범위가 넓고 다양한 물체와의 거리 측정이 가능한 장점이 있지만, 현재까지의 기술로는 대상 물체와의 거리가 15m 이상인 경우에는 거리 측정이 어렵다는 단점이 있다.
[응용분야]
실내외위치인식 기술은 로봇생산업체, 산업현장, 군사용, 홈네트워킹, u-Health 등 많은 위치인식을 이용하는 다양한 분야에서 많이 연구 도입되고 있다.
응용기술
|
외부 간섭 자계에 강인한 Dual Electric Compass |
[기술내용]
본 기술은 Dual Electric Compass를 이용하여 외부의 간섭 자계에서도 절대 방위각을 측정하는 기법이다.
Electric Compass는 지구 자계를 검출하여 절대 방위각을 지시하는 센서로 옵셋 오차, 크기 불일치오차, 비 직교오차, 비 수평오차의 측정 오차와 외부의 간섭자기장에 의해서 발생하는 외부 간섭오차가 발생하고, 고정된 위치에 있는 외부 자기장에 대해서는 보정 방법이 있지만 순간적인 외부환경에 의해 발생되는 오차에 대해서는 보정되지 않는다.
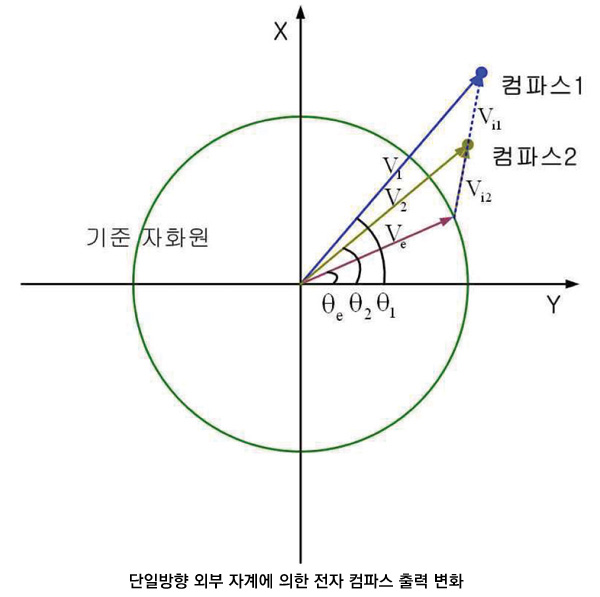
따라서 외부 자기장의 크기는 소스로부터의 거리의 제곱에 역으로 비례한다는 것을 전제로 해서 Compass 배치를 같은 방향 수평으로 정렬하고 일정한 거리로 서로로부터 분리된 Dual Electric Compass를 사용한다.
동일한 방향에 의한 외부 간섭이 각각의 Compass에 미치는 영향은 방향은 같지만 크기가 다르게 출력 되고, 이런 Compass 출력의 크기 변화를 이용한 실시간 보정을 통해 절대 방위각을 측정한다.
[응용분야]
Dual Electric Compass를 차량이나 로봇에 장착했을 때 외부의 자계 영향에 의한 방해로부터 절대적인 방위를 지시할 수 있고, 로봇의 네비게이션 뿐만 아니라 방향을 요구하는 모든 분야에 용이하게 적용할 수 있고 소형화와 저가격으로 사용할 수 있다.
소프트웨어 연동기술
|
모바일 로봇의 소프트웨어 패치를 위한 P2P 기반의 배포 기술 |
[기술내용]
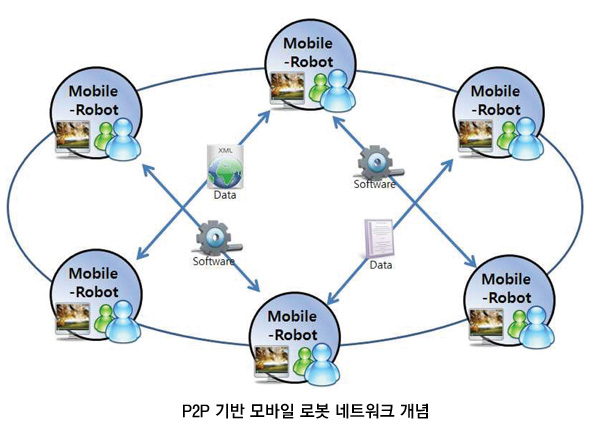
로봇의 특성상 새로운 소프트웨어의 설치와 데이터 전송 시 유선으로 연결하여 전달하는 것이 대부분이다. 하지만 기존의 방법으로 대량의 로봇에게 소프트웨어와 데이터 전송 시 많은 시간과 비용이 들게 된다.
본 내용은 로봇의 업데이트된 펌웨어나 새로운 데이터 발생시 P2P(Peer-to-Peer) 기법을 이용해 모바일 로봇에게 빠르고 효율적으로 배포할 수 있는 기술이다.
[응용분야]
모바일 로봇뿐 아니라 그 외에 스마트 폰, PDA 등 다른 모바일 장비들에도 유용한 기술이기 때문에 모바일 전 분야에 이 기술을 적용이 가능하다.
숭실대학교 지능형로봇연구소 http://i3rc.ssu.ac.kr







