
한국기계연구원 로봇연구실 Open Lab
국내 산업용 로봇기술의 다음을 본다
지난 30년간 국가 기반 산업을 선도하는 기계분야 전문연구기관으로 자리매김해 온 한국기계연구원에서는 최근 수년간 노력을 기울여 완성시킨 듀얼암 로봇, 중량물 취급로봇, 고강성 병렬형 로봇, 센서 등을 산?학?연 로봇관계자들에게 소개하는 자리를 마련했다. 기계 관련 핵심 기술 뿐 아니라 재료, 자동화, 제어, 컴퓨터 기술 등 첨단 분야가 집적된 지능형 복합기계기술로써 자리잡아가고 있는 국내 산업용 로봇 기술에 대한 가능성을 제시했던 본 행사를 본지가 찾았다.
취재▶▶박서경 기자(press2@engnews.co.kr)
기계연 30년 로봇 노하우를 한눈에
가을의 문전으로 접어들고 있던 지난달 2일, 대전에 위치한 한국기계연구원에서는 최근 몇 년간의 노력으로 맺어낸 결실들을 공개하는 자리가 마련됐다. ‘한국기계연구원 로봇연구실 Open Lab 행사’가 바로 그것.
로봇 관련 산업체와 연구기관 간의 기술협력 네트워크 구축이라는 목적 하에 마련된 이번 오픈랩 행사는, 지난해 11월 한국기계연구원을 비롯한 6개 로봇관련 국책연구기관이 한국로봇산업협회와 체결한 기술협력 네트워크 MOU의 후속조치로써 이뤄졌다. 이에 앞서 지난 1월에는 한국과학기술연구원이, 4월과 6월에는 ETRI와 한국생산기술연구원이 각각 기술발표 행사를 가진바 있다. 아울러 전자부품 연구원과 포항지능로봇연구소 등에서도 동 행사가 순차적으로 개최될 예정이기도 하다.
1981년 설립과 동시에 시작된 한국기계연구원의 로봇연구는 1985년 국내최초로 6축 산업용 다관절 로봇개발의 성공으로 이어진바 있다.
최근에는 듀얼암 로봇, 중량물 취급 로봇, 고강성 지능형 로봇 등 지능형 산업용 로봇 개발과 함께 실용화에 필요한 센서 등의 요소 및 부품기술 연구도 병행 추진하기도 했다. 이날의 행사는 이러한 그간의 성과물들을 로봇 관련 산?학?연 관계자들에게 소개하고, 관련 기관 사이의 기술 공유 및 협력 방안을 모색하고자 마련됐다.
산?학?연?관 로봇전문가 200명이 참석한 가운데 개최된 동 행사의 환영사를 맡은 이상천 한국기계연구 원장은 “로봇 기술이 기계 관련 핵심 기술 뿐 아니라 재료, 자동화, 제어, 컴퓨터 기술 등 타 첨단 분야가 집적된 지능형 복합기계기술”임을 밝히고, “앞으로 산업용 뿐 아니라 의료용 로봇, 군사용 로봇, 필드용 작업 로봇 등 서비스 로봇 분야에 대한 연구와 개발에도 힘쓸 것”이라 말했다.
다음으로 지식경제부 김홍주 로봇 팀장이 격려사와 연구기관 협의체 활동보고가 이어졌다.
연구기관 협의체 활동보고에서는 연구기관협의체 중 2010 Open Lab 행사를 이미 진행한 바 있는 한국과학기술연구원, ETRI, 한국생산기술연구원이 Open Lab 행사 이후의 성과에 대해 브리핑 했으며, 한국산업기술평가관리원(KEIT)에서는 로봇업계 요구 및 애로사항을 전달하기도 했다.

차세대 산업용 로봇의 핵심은 협업
이날의 본 행사인 ‘기계연 로봇연구실 핵심기술 발표’에는 ▲인간 협업 로봇 기술 ▲듀얼암 로봇 기술 ▲병렬형 로봇 기술 ▲중량물 핸들링 로봇 기술 ▲레이저 용접 로봇 응용 기술 ▲로봇 응용 요소 기술 ▲지능 기계 기술 등 7개 기술이 소개됐다.
첫 발표는 로봇 지능기계연구실 경진호 연구실장의 한국기계연구원 로봇 지능기계연구실 연구현황에 대한 소개로 시작됐다. 그는 1980~90년대까지 한국기계연구원에서 개발한 바 있는 6축 산업용 로봇, 스카라 로봇, Molding Part Handlig 로봇, Polishing 로봇, Heavy Duty Handling 로봇, 도장 로봇 등 단순반복 작업을 위한 산업용 로봇 개발 사례를 간략하게 소개했다.
다음으로 2000년부터 개발에 착수한 중량물 핸들링 로봇, 듀얼암 로봇, 병렬형 5축 가공 로봇 등 고능률 작업을 위한 산업용 로봇들에 대한 설명과 함께, 앞으로 인간-로봇 협업 매니퓰레이션 기술과 그린 에너지기기 양산화 기술지원센터 구축사업 등 협업 및 산업 서비스 작업이 가능한 협업 로봇 및 공존형 로봇 위주로 연구 개발을 지속해 나갈 것이라 밝혔다.
다음으로 박찬훈 박사가 협업로봇 기술에 대한 설명을 이어나갔다. 그는 인간-로봇 협업의 의미를 설명하고 이를 위해 전제가 되는 ▲쉬운 조작을 위한 작업지능 기술 ▲공동작업을 위한 절대안전기술 ▲노동력 절감을 위한 물리적 보상기술 등의 연구개발 필요성을 강조했다. 아울러 그는 ‘쉬운 조작’을 목적으로 개발된 직접교시기술의 설계 기술, 제어 알고리즘, 재현 알고리즘 등을 비롯해, ‘안전’을 위해 개발된 충격흡수식 안전기구 등에 대해 설명했다.
이어진 발표는 최근 언론 보도를 통해서도 알려진 바 있는 산업용 ‘양팔로봇 시스템’과 관련하여 ‘양팔로봇의 협조제어시스템 기술’이라는 제목으로 박경택 박사가 발표를 맡았다. 본 로봇은 사람과 같이 양손을 이용해 작업이 가능하여 각 손에 볼트와 너트를 쥐고 나사를 조이는 등의 작업이 가능하다. 또한 섬세한 조립작업이 요구되는 조선 및 항공, 방위산업에도 적용이 가능함은 물론 기존 한팔 로봇 보다 2배 이상의 작업 속도를 낼 수 있다는 장점이 있다. 발표에서는 양팔로봇의 핵심기술이라고 할 수 있는 협력작업 기구학, 충돌방지 알고리즘, 제어기 시스템 구성, 실시간 제어 SW, 직접교시, 임피던스 제어와 관련된 내용들이 소개됐다.
박동일 박사는 ‘병렬형 로봇기술’에 대한 소개와 함께 적용된 핵심기술을 소개했다. 본 로봇은 세계적 수준의 고강성 Parallel Platform형 로봇으로써 고자유도를 통해 3차원 복합형상 5면 가공이 가능하다. 또한 고접급성, 고속의 이송속도를 통한 복합가공 및 조립작업이 가능한 병렬형 로봇 시스템이기도 하다.
박동일 박사는 본 병렬형 로봇의 개발을 통해 ▲복합가공용 하이브리드 병렬기구 ▲하이브로 병렬기구용 무빙헤더 ▲5자유도 병렬형 공작기계의 오차보정 방법 등의 개발기술 관련 특허를 출원했으며 설계, 보정, 제어, 프로그램 등에 있어 자체 기술을 확보했음을 밝혔다.
한편 그는 다양한 5축 가공 예시 동영상을 제시하며, 본 로봇의 사업화 타깃으로써 자동차 부품 엔진 실린더 헤드 가공, 항공기 동체 드릴 작업 등을 염두에 두고 있다고 말했다.
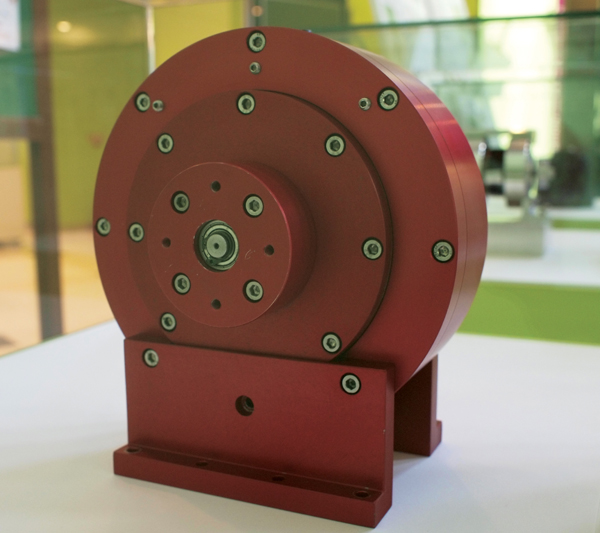
연구자석을 이용한 MR 브레이크 회전 동심형 자석기어 중공형 구동 모듈 로봇구동용 공기압 인공근육


제어전류 입력 없이 일정 회전속도 이상에서 제동력이 발생한다. 속도제한이 요구되는 의료용 로봇, 놀이기구 분야에 쓰일 수 있다.
회전동심축에 설치되어 자석수에 따른 감속비를 구현한다. 로봇 비접촉 감속분야에 적용가능하다.
중공 모터, 감속기, 브레이크, 엔코더, 드라이버 일체형 구동모듈로써 협업로봇 및 고밀도 공정 로봇에 적용가능하다.
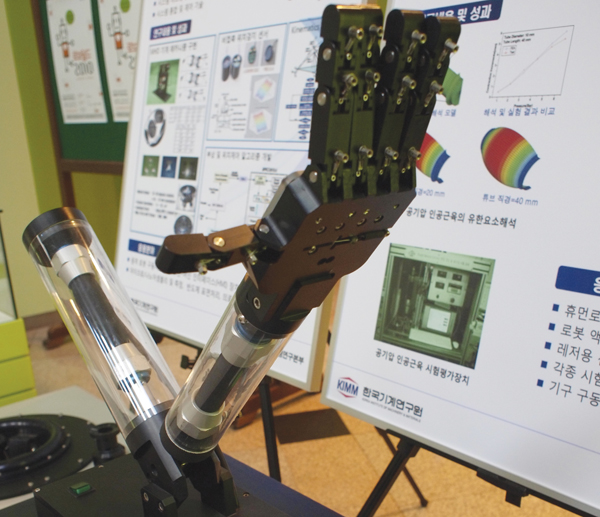
휴먼로봇 인공근육, 로봇 액추에이터 등에 사용 가능한 로봇구동용 공기압 인공근육으로 제작된 로봇 핸드.
로봇기술의 핵심, 로봇 응용요소기술
잠깐의 브레이크 타임을 가진 후 김두형 박사가 ‘중량물 핸들링 로봇기술’에 대한 소개를 이어갔다. 지난 iROBAS 2009에서 일반에 소개된 바 있는 본 로봇은 경상남도 지역산업중점기술개발사업에 의해 개발된 로봇으로 자동차 및 중공업 분야에 초중량물 취급 및 조립에 적용할 수 있는 초 중량물 핸들링용 지능형 로봇이다.
김두형 박사는 기구부 기본설계와 기구사양 결정, 동역학 해설, 기본설계 결과와 구조해석 등 로봇 제작 과정에서의 적용기술들을 설명하고, 아울러 6축 초중량물 핸들링 다관절 로봇용 아날로그 컨트롤러의 단계별 개발 과정과 기술도 함께 소개했다.
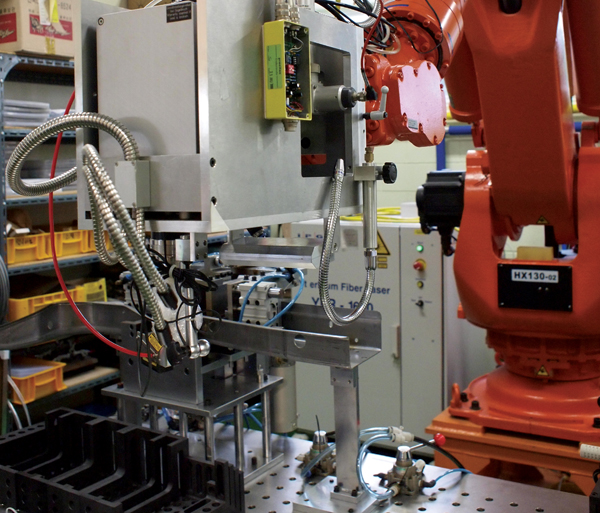
다음으로 ‘레이저 용접 로봇 응용기술’에 대한 발표가 이어졌다. 광응용생산기계연구실 서정 박사팀이 개발한 레이저 용접 로봇은 기존 저항 점용접 방식이 갖고 있는 자동차 설계 및 생산방식의 한계를 뛰어넘는 원격 레이저 용접기술이 적용된 로봇이다. 그는 원격 레이저 용접 로봇시스템에 적용된 시스템 통합 제어 기술, 스캐너와 로봇의 연동 제어 소프트웨어, 플라즈마 센서, 용접 변형율 최소화 및 속도 향상 기술, 레이저 용접 지그, 모니터링 및 품질평가 기술 등을 언급하며 독자적인 원격 레이저 용접기술 및 시스템 구성기술을 확보할 수 있었음을 강조했다. 또한 차량 경량화 및 용정공정의 레이저 대체기술 기반 구축을 통해 고가의 외산장비 수입 대체 효과가 클 것이라 전망했다.
한편, 이날 발표에는 산업용 로봇 뿐 아니라 로봇 응용요소기술과 지능 기계 기술에 대한 발표도 함께 진행됐다.
프린팅공정자연모사연구실 허신 박사는 생체 근육 운동을 모방한 새로운 형태의 탄성 액추에이터를 소개했다. ‘Fluidic Muscle 실린더’로 불려지는 본 공기압근육구동기는 인공손, 인공근육, 인공의족 등 복지로봇에 쓰이는 액추에이터로써 유연한 재질과 동작 구현이 가능하다. 구조가 간단하고 가벼우며, 생체 근육과 유사하여 골격 모형 위에 직접 배치가 가능하다는 장점을 갖고 있다. 허신 박사는 연구 내용 등을 소개하며 시장 규모와 앞으로의 발전 가능성에 긍정적 견해를 피력했다.
이어진 ‘지능기계기술’에 관한 발표는 손영수 박사가 맡아 진행했다. 지능기계 기술이란 전자기(Electormagnetic) 응용기술 기반의 고효율 지능형 기계 시스템 및 구동장치 기술을 뜻하는 것으로, ▲로봇 및 지능기계의 구동장치 및 제어기술 ▲마이크로 부품 연속 생산용 핫엠보싱 IH기술 ▲Mobile Power Generation 구동기술 등이 이에 속한다.
그는 중점추진사업으로써 △그린에너지기기 양산형 생산기술 개발 △휴대형 군사장비를 위한 kW급 소형 동력원 개발 △우주물체 전자광학 감시체계 구동제어기술 개발 등을 소개하고, 아울러 로봇 관련 분야에 대한 연구들도 함께 소개했다.
|
|
|
|
|
직접 교시를 통해 디버링 로봇의 경로를 설정하고 있는 모습 |
600kg의 중량물을 들고 각 축을 움직여 보이고 있는 고중량물 핸들링 로봇
|
양팔을 이용해 어셈블리 작업을 수행하고 있는 듀얼암 로봇 |



눈으로 확인한 최첨단 산업용 로봇기술
발표가 끝난 뒤 행사 참가자들은 연구동 실험실로 이동하여 협업로봇, 듀얼암 로봇, 중량물 핸들링 로봇, 레이저 용접 로봇의 시연을 참관했다.
협업로봇의 시연에서는 직접 교시를 통한 디버링 과정이 그대로 재현됐다. 경진호 박사는 로봇전문가가 없는 중소 제조업체에서도 직접 용접, 디버링 등의 작업경로를 손쉽게 생성할 수 있음을 강조했다.
참관객들 역시 로봇의 구성과 운용방법에 대한 많은 질문들을 쏟아내 협업로봇에 대한 관심을 엿볼 수 있었다.
중량물 핸들링 로봇의 시연에서는 로봇이 무리 없이 600kg의 중량물을 들고 각 축을 부드럽게 움직이는 모습을 보이기도 했다.
이어진 듀얼암 로봇 시연에서는 로봇이 양끝에 볼트와 너트를 잡고 다양한 각도에서 조립하는 모습이 보여졌다. 경진호 박사는 말단의 위치오차를 극복하기 위해 적용된 기술들을 설명하며, 듀얼암 로봇의 산업현장 활용 가능성을 눈으로 확인시켰다.
참관객들은 마지막으로 레이저 용접 로봇의 용접 및 마킹 테스트 과정을 살피고 용접된 결과물을 직접 확인하며, 장비에서의 로봇의 역할과 레이저 기술에 대해 많은 질문을 던지기도 했다.
한편, 이날 시연 행사와 더불어 본관동 대강당 로비에는 센서를 비롯한 다양한 로봇 요소기술들이 전시되어 참관객들의 눈길을 끌었다.







