
日, 농업과 IT융합을 통한 생산성 혁신
로봇이 모내기하고 수확하는 시대가 왔다!
농업, 그리고 농촌은 식량공급, 국토?자연 보전 등 중요한 역할을 담당하나 농업인구 감소와 고령화 확산으로 농업생산액 감소 등으로 당면한 문제는 심각하다. 농업분야 종사자는 1960년 1454만 명에서 2005년 335만 명으로 급감 추세이며, 종사자의 58%가 65세 이상 고령인구인 것이다. 이처럼 농업부문의 낮은 생산성을 해결하는 대안으로 로봇과 IT를 활용한 농업 개혁에 정부 차원에서 관심이 높아지고 있다.
일본의 농업 IT 융합 5대 방향
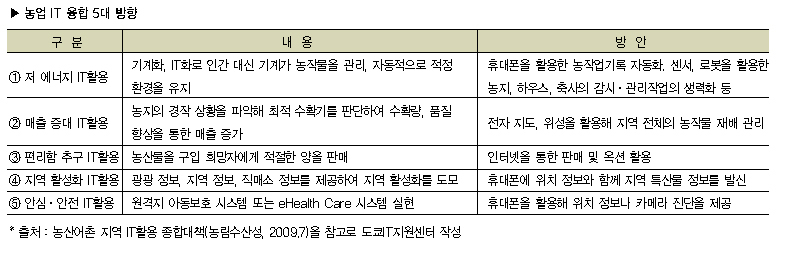
일본정부는 농업 IT융합 추진 방향으로 저에너지 IT, 생산성 증대 IT, 편리함 추구 IT 등 5대 추진 방향을 정립하고 구체적인 시범사업(Pilot Project)을 추진 중이다.
농업 IT 성장의 핵심 솔루션은 농지 성분 분석 센서, 초청밀 GPS 위치 정보 센서, 비접촉 성분 측정 센서 등 농업용 전문 센서이다.
현재 농지의 강도, 공기량 측정 센서 등 시장 니즈가 있으나 개발에 성공한 기업이 부재한 상태로 농업 IT분야는 현재 시범사업 단계로 글로벌 핵심 기술 보유 기업과의 기술 제휴를 통한 제품 개발이 필요한 상태다.
세계의, 그리고 한국의 농업용 로봇
광범위한 농업 에이커의 경작에 사용되는 다수의 농업용 로봇 개발들이 보고되고 있다. 파종, 제초작업, 뿌리와 광범위한 에이커의 수확, 임학나무(묘목생산) 및 원예(과일과 야채 따기 등 광범위한 농업 에이커의 경작에 사용되는 다수의 농업용 로봇 개발되고 있는 것이다. 하지만 서비스로봇들은 대부분 어플리케이션이 고급 센서 데이터 처리에 의존하고 있어 여전히 여러 가지 과제들을 안고 있으며, 널리 상용화되어 있지는 않다. 다만 농업자동화의 다양한 분야에 대한 자동기계의 효율성, 기능성, 견고성 등에 대해 상당한 연구가 현재 진행 중이라는 사실만 확인할 수 있다.
우리나라의 경우, 지난해 농업용 로봇 시장 규모는 28억원 규모로 미미한 수준으로 알려져 있다. 농촌진흥청에서 개발한 접목 로봇을 국내 한 중소 서비스 로봇업체가 상용화에 나서고 있고, 전북대학교에서 시설농업용 지능형 로봇에 대한 연구를 진행하고 있지만 역부족 상태다. 한편 지난해 농업용 지능형 로봇 상용화를 위해 한국로봇산업협회와 농촌진흥청은 ‘농업용 로봇산업 융합 포럼’ 구성을 추진했지만, 단순히 논의 단계에서 머물렀을 뿐 구체화되지는 않은 것으로 알려졌다.
사례 1. 농업용 로봇 슈트
- 제 품 명 : 농업용 로봇 슈트 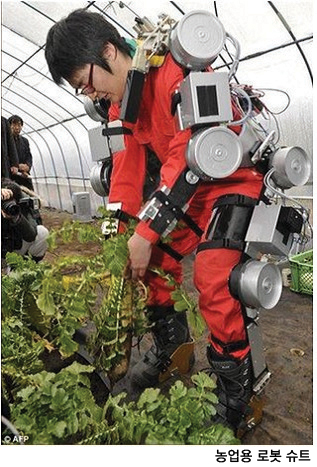
- 개발주체 : 동경 농공대학 대학원
- 개발기간 : 2007~12년
기존의 농기계는 사이즈가 커서 소규모 농지나 경사지, 비닐하우스 내 등 좁은 장소에서 사용 가능할 수 있는 농기계에 대한 요구가 높은 상태였다.
이를 위해 개발된 농업용 로봇 슈트는 어깨?팔꿈치?허리?무릎의 4군데에, 좌우 합계 8개의 모터가 있어 장착자의 움직임을 센서가 감지하고, 모터에 의해 동작을 돕는 로봇으로, 팔 작업이 필요한 포도 수확, 무릎을 많이 사용하는 무수확 시 60~70% 정도 생력화를 실현해 주목받았다.2007년 8월부터 동경 농공대 대학원이 개발해 2012년 판매 예정이며 가격은 3000달러 수준으로 알려졌다.
출처 : http://keyaki2.cocolog-nifty.com/blog/2009/01/20090110-a840.html
사례 2. 자동 주행 모내기 로봇
- 제 품 명 : 자동 주행 모내기 로봇
제 품 명 : 자동 주행 모내기 로봇
- 개발주체 : 중앙농업 총합연구센터
- 개발기간 : 1997~08년
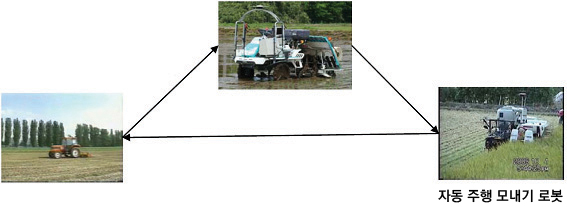
1997년부터 개발해 2008년에는 경제산업성의 ‘올해의 로봇’ 대상을 수상한 자동 주행 모내기 로봇은 시판되는 모내기 기기에 RTK-GPS와 IMU(관성측정장치)를 연결하여 경사와 진행  방향을 각각 계측해 컴퓨터로 각부의 조작량을 산출하고 자율 주행하도록 했다. 모내기 생산성은 3,000m2를 50분으로 실현하고, ±10cm의 오차로 주행한다. 가격은 500만∼750만 엔 수준(일반 모내기 기기 250만 엔의 2∼3배 수준)이며, 추가 비용은 기존 모내기 비용의 30% 이내, 노동 시간은 50% 절감 달성이 최종 목표다. 무인 모내기 로봇에서 개발한 위치 측정 기술, 기기 제어 모줄을 수확기, 경운기에도 적용해 농업의 대부분의 작업을 무인화, 자동화할 예정이다.
방향을 각각 계측해 컴퓨터로 각부의 조작량을 산출하고 자율 주행하도록 했다. 모내기 생산성은 3,000m2를 50분으로 실현하고, ±10cm의 오차로 주행한다. 가격은 500만∼750만 엔 수준(일반 모내기 기기 250만 엔의 2∼3배 수준)이며, 추가 비용은 기존 모내기 비용의 30% 이내, 노동 시간은 50% 절감 달성이 최종 목표다. 무인 모내기 로봇에서 개발한 위치 측정 기술, 기기 제어 모줄을 수확기, 경운기에도 적용해 농업의 대부분의 작업을 무인화, 자동화할 예정이다.
출처 : http://j-net21.smrj.go.jp/develop/robot
/entry/20081204-10.html
사례 3. 딸기 자동 수확 로봇
 - 제 품 명 : 딸기 자동 수확 로봇
- 제 품 명 : 딸기 자동 수확 로봇
- 개발주체 : 생물계 특정 산업 기술연구 지원센터, 에스아이 정공
- 개발기간 : 2002~08년
딸기 자동 수확 로봇은 말 그대로 수작업 로봇으로 야간에 레일 위를 이동하면서 딸기를 자동 수확하는 로봇이다. 과실의 인식은 카메라3대, 편광 필터 부착LED조명 5개, 초음파 센서로 하며, 좌우의 카메라로 촬영하여 익은 딸기만을 선택하여 3차원 위치 측정으로 오차를 방지한다. 과실을 가까이 끌어당기기 위해서 흡착하여 가위로 절단하는데, 딸기 1개 수확시간은 9∼12초로, 야간 무인 수확을 실현하여 생산성을 향상시킨다. 성공 수확율은 51∼69%이다. 사람이 수확시 딸기 재배 평균 노동 시간은 1000㎡당 1900시간이며, 수확은 450시간 소요된다.
출처 : http://j-net21.smrj.go.jp/develop
/robot/entry/20081031-02.html
자료 : KOTRA / 코트라 도쿄KBC







